
控制系統(tǒng)工作原理
城南二哥2021-07-29 16:54:46防紫外線面料原理1119來源:防紫外線布_防紫外線面料網
操縱系統(tǒng)工作原理


 AAASDFERGTRHRSVSGHRUTO
AAASDFERGTRHRSVSGHRUTO
W—2200電控板電路圖見圖3-44??棛C接通電源后,各變壓器及邏輯操作單元通電,做好開車打算。當按下“READY”(打算)按鈕后,除濕風泵及儲緯風泵(對SR、RD測長而言)開始運轉,為開車做好打算;對于電子選緯系統(tǒng),其電源及備紗系統(tǒng)也開始工作。當“RUN”(運轉)按鈕接通時,織機主電動機瞬時啟動,織機開始運轉,探緯單元及其他故障檢測單元亦開始工作,對織機工作狀態(tài)進行監(jiān)測。當遇到下列任一種情況時:探緯單元發(fā)出缺緯信號、故障檢測單元發(fā)出故障信號、按鈕發(fā)出停止指令、電子選緯發(fā)出缺緯信號等,操作單元通過執(zhí)行元件使主電動機停止運轉、電磁制動器通電,迅速定位停車。
停臺時,按下噴水織機在不按打算按鈕時,可以直接進行“點動正轉”或“點動反轉”的操作,“正轉”或“反轉”點動的操作,可以進行點動步幅的調整。同時對于“反轉”的操作,可以進行“反轉一周”的選擇。
停臺時,按下噴水織機的“BREAK”(制動)按鈕,可以解除制動(剎車),便于人工轉動機器進行調整。ZW系列織機操作系統(tǒng)不設置“RUN”(運轉)按鈕。其運轉的操作,是直接使用“FORWORD”(正轉)按鈕完成的(在打算鈕工作之后,按正轉鈕即為運轉;不按打算鈕,直接按正轉鈕即為點動)。
織機的定位停車及故障檢測、緯紗探測等都通過接近開關或角度傳感器(完電編碼器)作時序操作。
織機的定位停車,由制動單元、電磁制動器來完成。
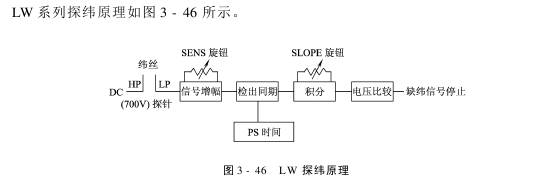
1.LW系列電控板工作原理
LW電控板使用HD64180CPU作為中心操作,織機的信號處理及分析均由它來操作,主要操作程序存放于存儲器27256。其操作軟件由主控程序模塊及中斷服務程序模塊組成??棛C開機后,計算機馬上從輸入口輸入監(jiān)測信號,然后推斷處理。
LW系列邏輯單元(主控單元)直接操作電動機的各種工作狀態(tài)(啟動、停止、制動),并隨時監(jiān)測各處工藝觸點的現時狀態(tài),做出相應對策。
邏輯單元設置有:主電動機超力矩時間調整;反接制動時間調整;點動時間、方式、間隔時間調整;制動時間調整;計長方式選擇。
信號綜合處理及輸出操作包含了探緯故障、LP信號后沿故障、HP故障等。當探緯信號正常時,在PS工作區(qū)域內,LP5產生由高電平至低電平的負脈沖;在探緯信號異樣時,LP5則會出現固定的高電平。此信號通過電路輸出和同步時序信號綜合后,由反向驅動器輸出至F—OUT點。當出現故障時,此點輸出一個負脈沖。
積分電壓綜合處理:本單元的LP4信號提供給比較電路,又提供給信號綜合的輸出電路,其作用是顯示積分調節(jié)狀態(tài)。其中前一部分為風值檢測電路,同時提供積分比較電壓。正常時,積分電壓顯示管常亮;當電壓過高時,此發(fā)完管閃爍;停車時,無積分電壓,則發(fā)完管熄滅。
2.ZW系列電控板工作原理
ZW系列電控板以邏輯操作電路為核心,使用CPU操作,其接受及檢測各種指令及工作狀態(tài),進行邏輯分析推斷,決策織機以后的狀態(tài)。
電控板的大部分運行狀態(tài)監(jiān)測信號的輸入及輸出電路均為完電耦合形式接入。電控板內的多個鈕子開關可作為各種工作狀態(tài)的選擇。電控板內可作下列調整:緯紗信號輸入延時及推斷延時;制動延時;寸動時間調整;反轉時間調整等。
3.PLC電控板工作原理
PLC電控板使用可編程序操作器作為織機邏輯操作的核心,以此接收及檢測各種操作指令及工作狀態(tài),將其進行處理后,以其輸出點操作驅動元件來實現織機工作狀態(tài)。PLC電控板全部的輸入、輸出點均有LED顯示,使用時,可以方便地觀看各處工作狀態(tài)。
PLC電控板利用可編程序操作器上的內置電位器可以做以下調整:啟動時間;送經延時時間等。
4.探緯電路原理
(1)觸指式探緯原理:織機運轉時,水流及含水的緯絲和探針接觸,由于水的導電性,使肯定的電流由高壓側探針流向低壓側探針,從而使探緯器信號處理單元接收到所需的緯絲信號。這里接收到的信號包含:緯絲信號、水信號、緯尾信號及漏電信號。探緯信號處理單元就是將此混合信號加以處理,濾去無用信號,保留并放大緯絲信號。信號處理單元利用PS信號進行時段操作,將放大整形后的探緯信號進行計數比較,然后輸出工作指令。探緯接收到的波形如圖3-45所示。
ZW系列探緯原理如圖3-47所示。探緯電路一般由以下部分組成:輸入信號、狀態(tài)監(jiān)測信號、整形電路、積分電路、比較電路、處理電路及輸出電路等。
輸入信號主要包含:探緯信號(LP)、時序信號(PS)、缺緯模擬信號(OPT)、高壓電源信號(HP)、狀態(tài)監(jiān)測信號。
信號處理:探緯信號經過處理后,組成一個新的信號提供給末級的信號綜合。這里主要包含了整形電路、檢出電路、積分電路和比較電路。
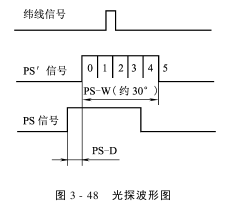
(2)完電式探緯原理:完電探緯的完探波形圖如圖3-48所示。
①緯絲信號:由完探頭的前后調節(jié)位置(310°~320°)進行變化。此完探信號變化較大時,說明投緯不穩(wěn)定。
②PS信號:PS信號的起始基準位置由PS—D電位器進行改變。PS信號的幅度由PS—W電位器進行改變。
③PS信號:基準為290°。
織造時當緯絲進入完電探緯的檢測區(qū)域后,遮斷完源,使檢測電路中產生“有緯絲”的信號即有PS信號;如無緯絲、完源不遮斷,檢測電路中出現“無緯絲”的信號,即無PS信號輸出,和PS信號比較后發(fā)出缺緯停止信號。
AAA

相關文章
